Department News
Launch of Playful, a success
- 14 December 2018
The robotic behavior orchestration software is now available to academia and industry.
Finalist Amazon Robotics Best Paper Awards
- 28 September 2018
AMD is one of three finalists for the Best Systems Paper
Our paper on “Real-time Perception meets Reactive Motion Generation” was considered for the 2018 Amazon Robotics Best Paper Awards in Manipulation. Amazon Robotics selected our paper as one of three Finalists for Best Systems Paper. They received so many high quality submissions and wanted to acknowledge your paper as one of the best.
Daniel Kappler Franzi Meier Jan Issac Jim Mainprice Cristina Garcia Cifuentes Manuel Wüthrich Vincent Berenz Stefan Schaal Nathan Ratliff Jeannette Bohg
Best paper award in IEEE Robotics and Automation Letters
- 25 April 2018
"Probabilistic Articulated Real-Time Tracking for Robot Manipulation"
The paper has been published in IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 577-584, April 2017. It has been considered the best paper published on IEEE Robotics and Automation Letters in 2017. IEEE RA-L published 305 papers in 2017.
Cristina Garcia Cifuentes Jan Issac Manuel Wüthrich Stefan Schaal Jeannette Bohg
Best paper finalist at ICRA 2018
- 03 April 2018
This paper is among the 5 best of about 2500 submissions. The 2018 International Conference on Robotics and Automation (ICRA) will take place from 21 until 25 May 2018 at the Brisbane Convention & Exhibition Centre, Brisbane, Australia.

Jeannette Bohg is a woman in robotics you should know about!
- 11 October 2017
Robohub 2017 list of 25 women in Robotics you need to know about
On the occasion of Ada Lovelace Day on 10 October 2017, robohub presented their annual list of “25 women in robotics you need to know about”. Recently, Jeannette Bohg became Assistant Professor in Computer Science at Stanford. She is Guest Researcher at the Autonomous Motion Department of MPI, where she did her research on robotics between 2012 and 2017. Congratulations!

Awards for Two Master Theses
- 07 June 2017
Cédric de Crousaz and Julian Viereck receive the ETH Medal for their outstanding Master Theses
Finalist for the Best Robotic Vision Paper
- 01 June 2017
at the 2017 IEEE/RAS International Conference on Robotics and Automation
The paper "Probabilistic Articulated Real-Time Tracking for Robot Manipulation" by Cristina Garcia Cifuentes, Jan Issac, Manuel Wüthrich, Stefan Schaal and Jeannette Bohg was finalist for the Best Robotic Vision paper at the 2017 IEEE/RAS International Conference on Robotics and Automation.
Cristina Garcia Cifuentes Manuel Wüthrich Jan Issac Stefan Schaal Jeannette Bohg

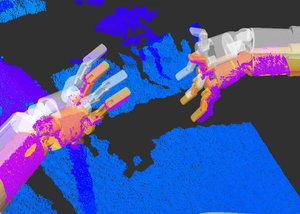
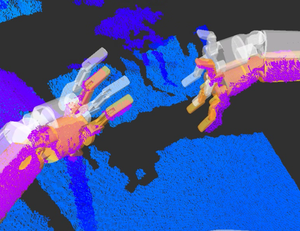
Release of Bayesian Articulated Object Tracking Libraries
- 29 May 2017
Robust and real-time Bayesian articulated object tracking methods, implemented in C++ and CUDA.
We release open-source code and data sets on Bayesian articulated object tracking. The library contains approaches towards problems ranging from single object tracking to full robot arm pose estimation. The data sets allow the quantitative evaluation of alternative approaches thanks to accurate ground-truth annotations.
Cristina Garcia Cifuentes Jan Issac Manuel Wüthrich Jeannette Bohg


Local networking event for women researchers from Tübingen
- 28 April 2017
Hosted this time by Jeannette Bohg