Finalist for the Best Robotic Vision Paper
at the 2017 IEEE/RAS International Conference on Robotics and Automation
- 01 June 2017
- Singapore
- Autonomous Motion
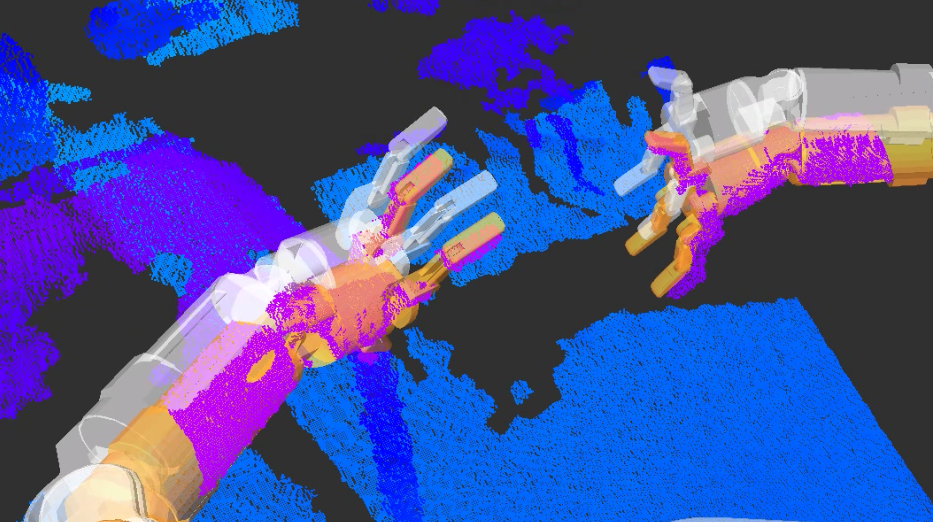
The paper "Probabilistic Articulated Real-Time Tracking for Robot Manipulation" by Cristina Garcia Cifuentes, Jan Issac, Manuel Wüthrich, Stefan Schaal and Jeannette Bohg was finalist for the Best Robotic Vision paper at the 2017 IEEE/RAS International Conference on Robotics and Automation.
The paper proposes a probabilistic filtering method which fuses joint measurements with depth images to yield a precise, real-time estimate of the end-effector pose in the camera frame. This method in combination with our previous work on object tracking endows a robust with robust hand-eye coordination.
Along with the paper, we release open-source code on Bayesian Object Tracking and data sets annotated with ground truth on rigid or articulated object tracking.




